Arduino articulated plotting robot June 2009
As a first project and a first step towards much larger things we are planning at Maschinenring I came up with something that a) makes sense and b) can be done with a minimum of money (€10 if you already have an Arduino) and a main focus on programming: A two-joint articulated plotting robot.
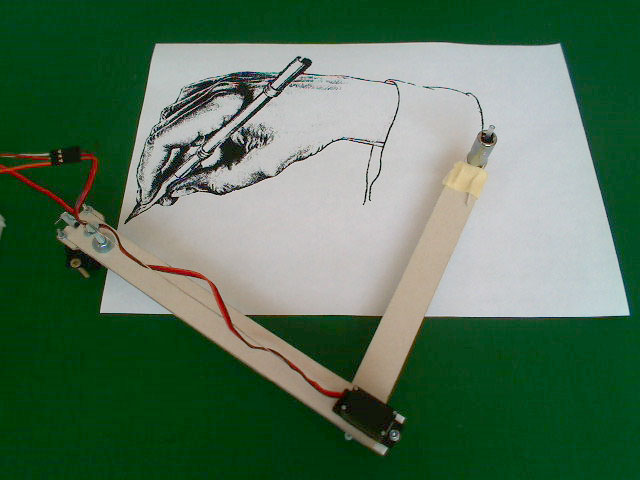
Unfortunately, this picture is a fake :)) but I could not resist using this Escher quote (actually i guess the hand should carry a screwdriver to make it symmetrical but I didn’t want to spend too much time in Photoshop for now). The real plotting results are much more disappointing because of mechanical errors which are not really controllable in software (and no, it’s not the fault of the cardboard used for building the robot arms) and accumulate to an error of approximately +/- 0.5cm in the output.
Nevertheless, it was a fun project and great for getting back into some hardware-oriented programming and thinking about things like optimizing calculations for integer math. More details (including a video of the robot in action and the Arduino source code) can be found at the Maschinenraum blog.
Heres a picture of the actual output: this should be an orthogonal spiral with a winding width of 1cm. (Sorry for the crappy quality, I only have a webcam for taking pictures right now.)

Because of the low precision I didn’t bother to program a way to upload more complex graphics to the robot yet, so output geometry is limited to things one can easily implement procedurally. Send me code if you want something drawn, and I send you an arm-signed drawing from the artist ;).